| 产品特性:机械手 | 品牌:誉佳兴聚友 | 型号:YJX-ZE |
| 类别:机械手 | 售后服务:一年保修,终身服务。 | 产品别名:叠杯机 |
| 产品用途:辅助吸塑机的成品堆叠 | 电动机功率:1.75KW+0.4KWKW | 外形尺寸:1300×600×2000mm |
| 重量:250kg |
YJX-ZE打杯机吸塑机专用堆叠机械手

一、主要配置表Main Configuration Table :
型号Model: | YJX-ZE |
进退伺服控制器Forward and Back Servo Controller: | 三菱1KW Mitsubishi 1KW |
进退伺服电机Forward and backward servo motor: | 三菱0.75KW Mitsubishi 0.75KW |
上下堆叠伺服控制器Up and down stacked servo controller: | 三菱1KW Mitsubishi 1KW |
上下堆叠伺服电机Up and down stacked servo motor: | 三菱1KW Mitsubishi 1KW |
输送电机功率Conveyor motor power: | 0.40kw |
输送控制功率Conveying control power: | 1.5KW |
抓取堆叠速度Grab stacking speed: | 16~26次/分钟 16~26times per minute |
使用气源air source: | 0.8Mpa |
使用电源Use Power Supply: | 220V/2P |
进退上下导轨Upper and lower guide rails for advance and retreat: | 上银 HIWIN |
吸盘材质Sucker Material: | SMC硅胶 Silica gel SMC |
吸取控制Absorption control: | SMC真空发生器Vacuum Generator SMC |
信号连接线Signal Connecting Line: | 通讯线Communication Line |
信号、接近开关Signal, proximity switch: | 欧姆龙Omron |
开关、接线端子Switch and terminal: | 施耐德Schneider |
取料模具Feeding Die: | √ |
输送带Conveyor Belt: | √ |
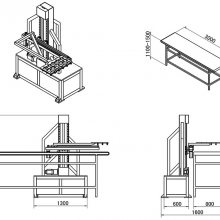
机械手外观尺寸Appearance Dimensions of Manipulators: | L:1300mm×W:600mm×H:2000mm |
输送带外观尺寸Appearance Size of Conveyor Belt: | L:3000mm×W:600/700/800mm×H:570-1500mm |
整机重量Machine weight: | About 250kg |
二、机组概述Summary:
YJX-ZE制杯机机械手是一个集取杯、堆叠、点数于一体的轻量化机械手系统,具有动作灵敏、结构设计简单、适应性强、精度高、一定的承载能力等特点。本机机械手手部采用了吸取型设计,抓取稳、准、快。抓取后输送带自动化输送。
YJX-ZE cup making machine manipulator is a set of collectting cups, stacking cup, counting in one of the lightweight manipulator system, has the characteristics of flexible action, simple structure, strong adaptability, high precision and certain carrying capacity etc. The manipulator of the machine with the suction type design, grabbing stability, accurately, fast. Automatic belt conveying after grabbing.
三、主要技术参数Main technical parameters:
1、机架部分:采用型钢、型材制造Frame: Made of Profiled Steel and Profiles;
2、控制器部分:进退以及上下控制采用伺服电机控制同步带,***满足了抓取以及堆叠的速度及精度Controller: Servo motor is used to control synchronous belt for forward and backward control and up and down control, which greatly satisfies the speed and accuracy of grasping and stacking.;
3、人机界面:使用运动控制Man-machine interface: using motion control;
4、使用优势:自动抓取、计数、堆叠、计数后输送带自动输送Advantages: automatic grasping, counting, stacking, counting after automatic conveyor belt conveyor;
5、机器保养注意事项:请勿溅水、油、粉尘等,避免接触易燃易爆及腐蚀性气体、液体,远离电器噪声源(等离子)Cautions for machine maintenance: Do not splash water, oil, dust, etc. Avoid contact with flammable, explosive and corrosive gases, liquids, away from electrical noise sources (plasma).